科技成果简介
成果名称:
园区无人驾驶系统
项目负责人:
曾国坤
所属领域:
人工智能、无人驾驶
成果简介:
本项目开发了无人驾驶清洁车,为实验室与企业合作项目,由实验室负责深度学习相关算法的研发,企业人员进行技术测试。目前,该无人清洁车已经能实现道路避障以及进行路径规划。此外,该设计能对周围环境进行感知,初具环境识别能力。园区无人清洁车主要应在学校中,用于学校内部路面的清洁工作。
该无人清洁车主要通过双目摄像头获取的图片信息,通过深度学习网络进行环境感知分析,并依靠激光、GPS、惯性导航仪等设备辅助无人车对于路面环境的感知。通过深度学习网络以及强化学习网络的训练,使得无人清洁车能够较快理解并成功在不同环境的路面下开展工作。在环境识别能力上,目前无人清洁车在500米范围内以每秒30帧的帧率对捕获的视频流进行分析,准确率在60%以上,且误判基本属于判定为障碍物,不影响其安全性。
应用范围:适用于各类园区、学校中的无人清洁工作。
随着人工智能的热潮以及无人车技术的兴起,无人车将会在各种场合里被使用。园区无人清洁车因其方便易用、高效实用等特点,市场前景乐观。
照片资料:
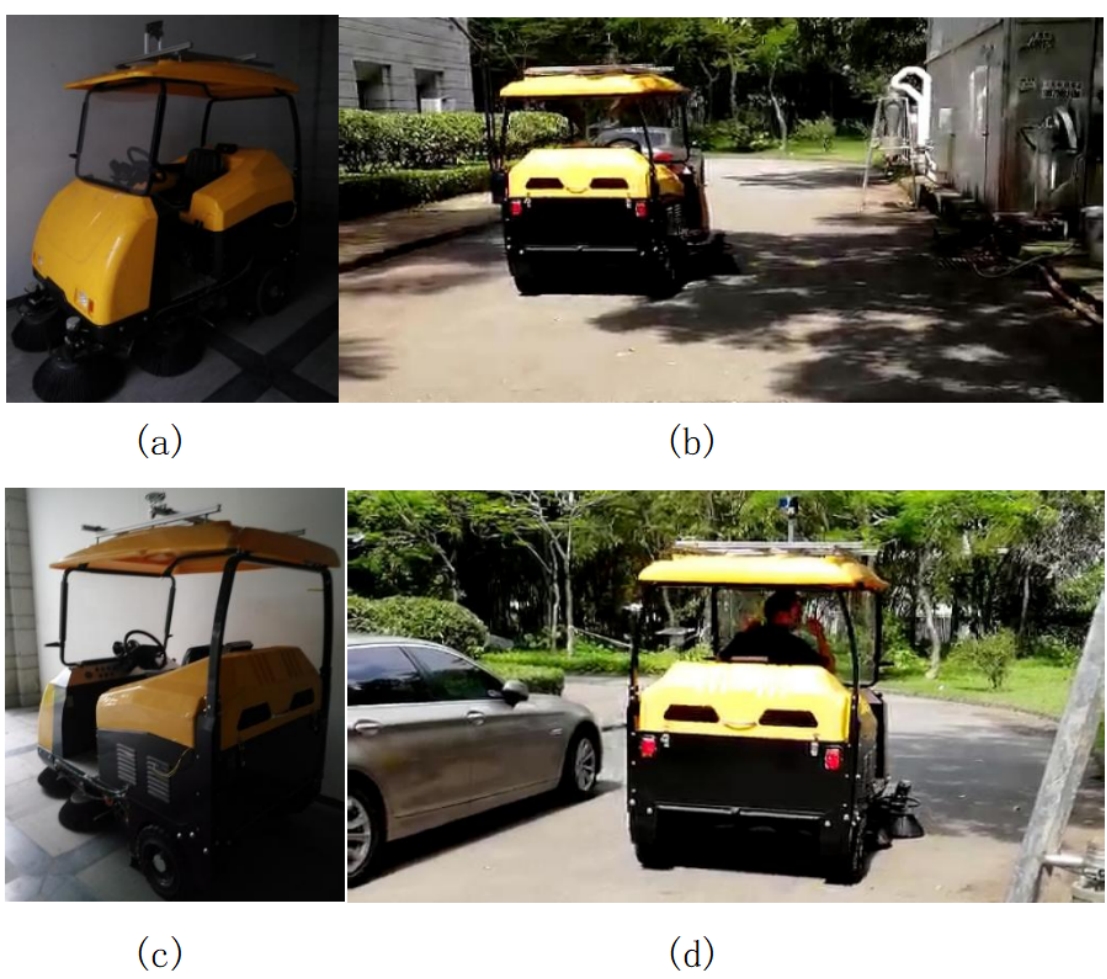
图片1
(a)清洁无人车正面 (b)无人车避障清洁 (c)无人车背面 (d)无人车运行
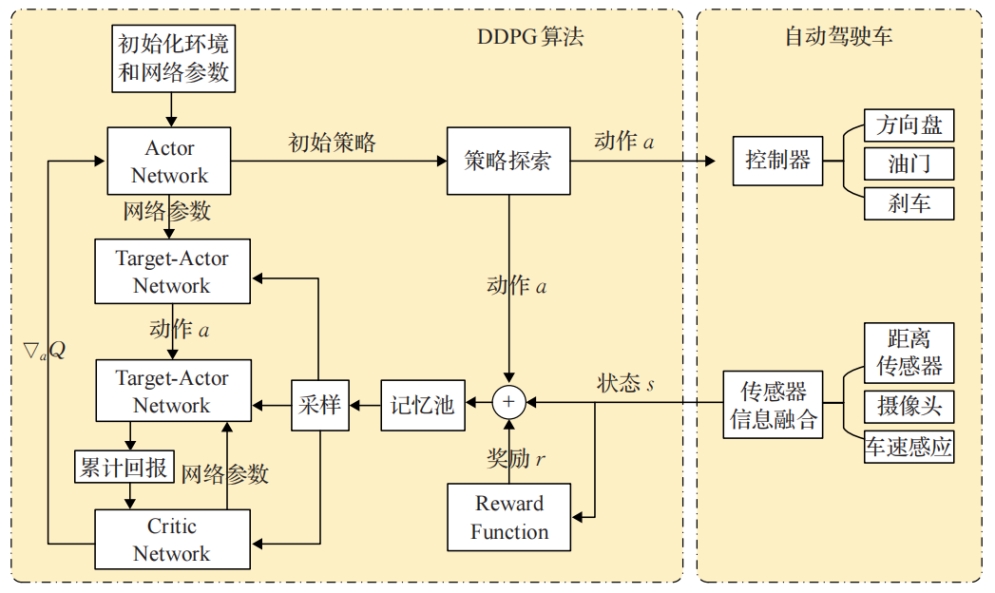
图片2 无人驾驶技术架构